5.1 Sensor kalibrieren
Der Sensor des Extruders ist dafür verantwortlich, dass die Zug-Geschwindigkeit des Filamentes automatisch geregelt werden kann, sodass die Zugkraft am Filament immer gleich bleibt. Der Sensor besteht aus einer optischen Lichtschranke (Optischer Endschalter) und einem 3D-gedruckten Sensor-Arm mit einer Blende. Diese Blende muss in weißer (denkender) Farbe gedruckt sein. Diese Blende wird von der Lichtschranke durchleuchtet. Um der Steuerung die korrekte Funktion des Sensors zu ermöglichen, führen Sie unbedingt diese Schritte durch:
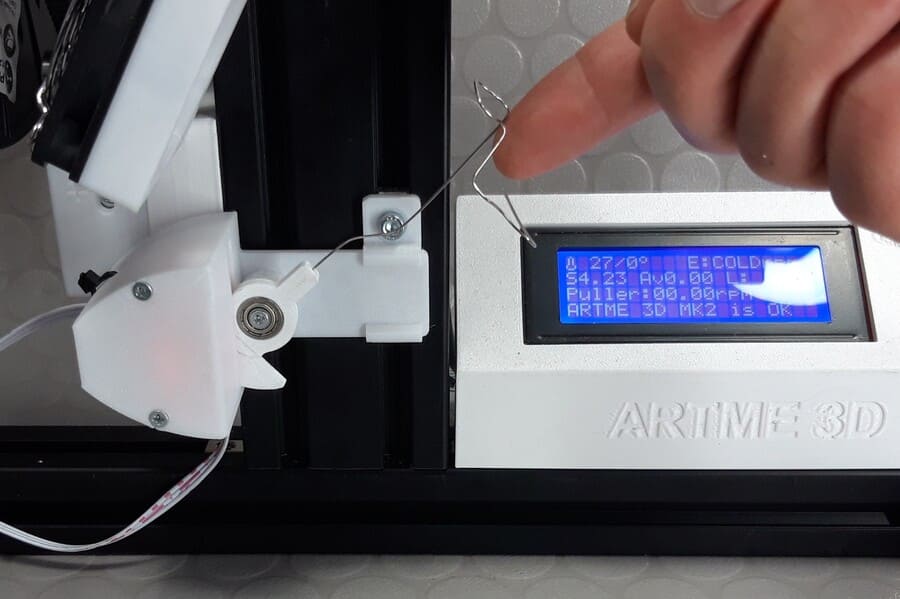
1. Auf der Informations-Ansicht des Displays sehen Sie unter “S:” den Sensor-Wert welcher sich bei Bewegung des Sensors verändert. Halten Sie den Sensorarm waagerecht und lesen Sie den Wert ab. Diesen Wert stellen Sie nun unter Hauptmenü – Control – Puller PID – Sensor Pos ein. Speichern Sie die Eingabe unter Hauptmenü – Control – Store memory. Die Steuerung versucht diese Position im Betrieb und bei automatischer Aufwicklung immer zu halten.

2. Halten Sie den Sensor nun in dargestellter Position und lesen wieder den Wert auf dem Display unter „S:“ ab. Diesen Wert stellen Sie nun unter Hauptmenü – Control – Puller PID – Sens RO Min ein. Speichern Sie die Eingabe unter Hauptmenü – Control – Store memory. Wenn im Betrieb diese Position für länger als 30 Sekunden überschritten wird, schaltet der Extruder selbsttätig ab (Sensor Runout). Das soll sicherstellen, dass bei einer Fehlfunktion der Aufwicklung der Extruder unkontrolliert Kunststoff extrudiert und sich damit selbst beschädigt.
3. Halten Sie den Sensor nun in dargestellter Position und lesen wieder den Wert auf dem Display unter „S:“ ab. Diesen Wert stellen Sie nun unter Hauptmenü – Control – Puller PID – Sens RO Max ein. Speichern Sie die Eingabe unter Hauptmenü – Control – Store memory. Wenn im Betrieb diese Position für länger als 30 Sekunden unterschritten wird, schaltet der Extruder selbsttätig ab (Sensor Runout). Das soll sicherstellen, dass bei einer Fehlfunktion der Aufwicklung der Extruder unkontrolliert Kunststoff extrudiert und sich damit selbst beschädigt.

4. Stellen Sie den Abstand des Sensors zur Extruderdüse ein, indem Sie die kleine Schraube am Sensorhalter lösen, den Sensor nach oben oder unten schieben und wieder befestigen. Der Abstand zur Düse wird an der Stelle gemessen, an der das Filament den Sensor berührt, wenn dieser waagerecht steht. Der Abstand kann abhängig vom Material zwischen 60 und 120mm betragen (roter Pfeil im Bild).

5. Nun kann der Sensor abgenommen werden, indem er nach links herausgezogen wird. Legen Sie ihn zur Seite. Das hat den Vorteil, dass der Sensor nicht beschädigt wird, wenn beim Anfahren des Extruders heißer, weicher Kunststoff aus der Düse kommt.
6.Achten Sie darauf, dass der Sensor im Betrieb niemals direkter Sonneneinstrahlung ausgesetzt wird. Das würde den Messwert verändern und die Filament-Kalibrierung und Aufwicklung stören. Gerade wenn der Extruder in der Nähe eines Fensters steht und mehrere Stunden läuft, kann es passieren, dass die Sonne nach einiger Zeit auf den Extruder trifft. Das sollte verhindert werden.
5.2 Zieheinheit kalibrieren
Das gezahnte Rad (Bauteil SP-16 Extruder Vorschubrad) an der Zieheinheit hat einen Durchmesser von 12mm. Darauf ist die Steuerung abgestimmt, sodass Drehzahlangaben und die errechnung der Länge des Filaments stimmen. Nur wenn Sie ein Vorschubrad mit einem anderen Durchmesser als 12mm verwenden, müssen Sie die folgenden Schritte durchführen:
- Messen Sie dazu den Durchmesser des Rades mit einem Messschieber.
- Um einen Wert in die Steuerung eingeben zu können, muss zuerst aus dem gemessenen Durchmesser der Umfang des Rades berechnet werden. Sie können dazu einen Online-Kreisrechner verwenden und dort den Durchmesser eingeben und erhalten den Wert des Umfangs. Oder Sie rechnen es mit folgender Gleichung aus (Das Zeichen * bedeutet multiplizieren.)
U=2*π*r
Also rechnen Sie 2 * 3,14 * die Hälfte vom gemessenen Durchmesser.
Ein Beispiel:
Wenn Sie einen Durchmesser von 12mm am Puller Rad messen, rechnen Sie 2 * 3,14 * 6. Das ergibt einen Umfang von 37,7mm.
Geben Sie diesen Wert unter Hauptmenü – Control – Puller PID – P circ ein. Der Wert muss in Millimetern angegeben werden. Speichern Sie danach die Einstellung (Hauptmenü – Control – Store memory) - Nun muss noch die Schrittzahl des Schrittmotors der Zieheinheit angepasst werden. Dazu muss folgende Rechnung beglichen werden:
steps/rev Schrittmotor*(Faktor Microstepping/gemessenen Durchmesser)
Der Wert „steps/rev Schrittmotor“ ist im Falle dieses des Extruders MK2: 200
Der Wert „Faktor Microstepping“ ist im Falle dieses des Extruders MK2: 2
Der Wert des errechneten Durchmessers anhand des zuvor genannten Beispiels: 37,7
Um das oben genannte Beispiel abzuschließen, rechnen Sie also
200*(2/37,7)
Also rechnen Sie zuerst 2 / 37,7 = 0,05305. Speichern Sie den Wert oder schrieben ihn auf.
Dann rechnen Sie 200 * 0,05305 = 10,61
Geben Sie den errechneten Wert unter Hauptmenü – Control – Motion – Psteps/mm ein. Speichern Sie danach die Einstellung (Hauptmenü – Control – Store memory)
5.3 Spule vorbereiten und einstellen
Der Zahnriemen am Spulenantrieb dient dazu, das Filament auf Spannung zu halten, während es aufgewickelt wird. Er dreht daher im Betrieb, ähnlich einer Rutschkupplung, leicht durch. Sollte die Zugkraft zu klein sein, kann das die Aufwicklung negativ beeinflussen. Ist die Zugkraft zu groß, kann der Spulenmotor blockiert werden. Daher muss die Riemenspannung eingestellt werden:
1. Drucken Sie sich den passenden Adapter (3D-Druckteil SD-G bis SH-Q), in Abhängigkeit des Innendurchmessers der Spule. Schieben Sie den Adapter auf den Spulen-Halter. Dann stecken Sie eine leere Filamentspule auf die Spulen-Halter.

2. Stecken Sie die Scheibe auf die Befestigungsschraube und drehen sie die Flügelmutter fest. In Abhängigkeit der Breite Ihrer verwendeten Spule können Sie Druckteil SH-R (Klemmhilfe) auf die Schraube stecken (zweites Bild), dann müssen Sie die Flügelmutter nicht auf das ganze Gewinde drehen. Das spart Zeit. Die Flügelmutter darf ruhig so fest gedreht werden, dass sich die Scheibe leicht nach innen biegt. Es ist wichtig, dass sich diese Schraube im Betrieb nicht löst.


3. Starten Sie nun den Extruder (im kalten Zustand, unter 90°C). Wählen Sie dazu im Hauptmenü-START Extruder. Nun dreht sich die Spule. Halten Sie die Spule mit der Hand fest und prüfen Sie, wie stark die Zugkraft ungefähr ist. Wenn Sie kaum eine Zugkraft spüren, muss der Riemen gespannt werden. Wenn es recht stark zieht oder der Motor blockiert, muss der Riemen gelockert werden. Dazu gibt es eine Stellschraube am Spulenantrieb. Diese Schraube können Sie mit einem 3mm Innensechskantschlüssel drehen. Drehen Sie die Schraube gegen den Uhrzeigersinn, wird die Riemenspannung erhöht. Drehen Sie die Schraube mit dem Uhrzeigersinn, wird die Riemenspannung niedriger.

Sollte der Einstellbare bereich nicht zum gewünschen Ergebnis führen, muss der ganze Spulenantrieb in der Höhe verschoben werden. Siehe dazu Aufbauanleitung Kapitel 06.
5.4 Temperaturregelung kalibrieren
Es ist notwendig, dass die Temperatur im Betrieb sehr gleichmäßig bleibt und nicht schwankt. Schon eine Temperaturveränderung von 1 – 2°C kann Einfluss auf die Qualität der Extrusion haben. Die Kalibrierung ist bereits beim Test der Bauteile vor dem Versand des Bausatzes durchgeführt worden. Daher sollten Sie diesen Schritt nicht durchführen müssen. Wenn Sie aber trotzdem im Betrieb zu große Schwankungen bei Ihrer Temperaturregelung feststellen, können Sie den Temperaturregler kalibrieren. Führen Sie dazu die Autotune Funktion aus. Diese finden Sie unter Hauptmenü – Control – Temperature – Autotune PID. Starten Sie die Funktion im kalten Zustand. Wenn Sie die Funktion gestartet haben, wird der Prozess einige Minuten dauern. Bedienen Sie das Gerät in dieser Zeit nicht. Wenn der Prozess abgeschlossen ist, beginnt die Steuerung zu piepsen. Durch Drücken des Drehknopfes schalten sie das Signal aus. Nun sind die Werte für die PID Regelung ermittelt und müssen noch gespeichert werden (Hauptmenü – Control – Store memory). Der Extruder kühlt selbsttätig wieder ab.