Aufbauanleitung
11-Sensor
Original Desktop Filament Extruder MK2.5 by ARTME 3D®
Version 17.03.2024
Nutzungslizenz:
Die Aufbauanleitung des „Original-Desktop-Filament-Extruder MK2 von ARTME 3D®“ wird unter einer CC BY-SA-Lizenz verwendet. Hier finden Sie die Details zur Nutzung.
Schritt 1/38
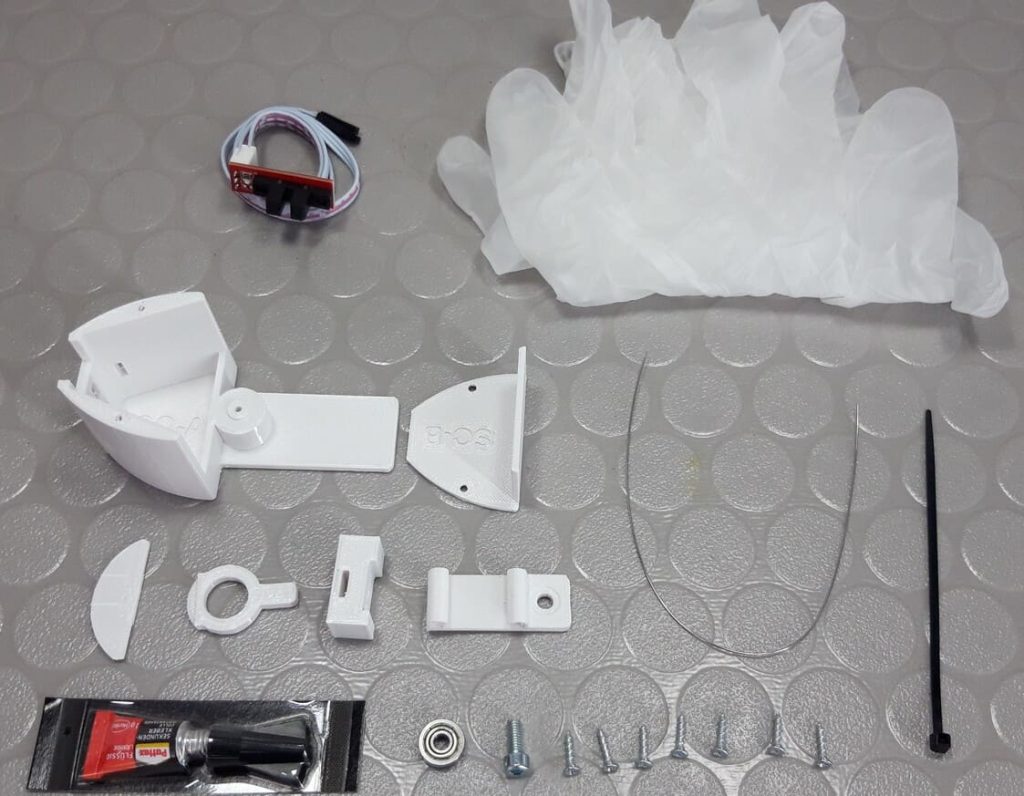
3D Druck: SO-A (Gehäuse), SO-B (Deckel), SO-C (Sensor-Befestigung), SO-D (Sensor-Arm), SO-E (Sensor-Blende), SO-F (Halterung), SO-G (Biegehilfe)
Aus Packstück 1 entnehmen: 7x Holzschraube 2,5×12 (SC-01), 1x Zylinderschraube M4x10 (SC05), Draht (SP-06), 1x Kugellager 4x12x4 (SP-07), 1x Kabelbinder (SP-23)
Aus Packstück 5 entnehmen: Sensor mit Anschlussleitung (EL-11), 3D-Druck-Teil SO-E (Sensor-Blende)
Aus Packstück 6 entnehmen: 1x Sekundenkleber (TO-13), 2x Gummihandschuhe (TO-14)
Schritt 2/38
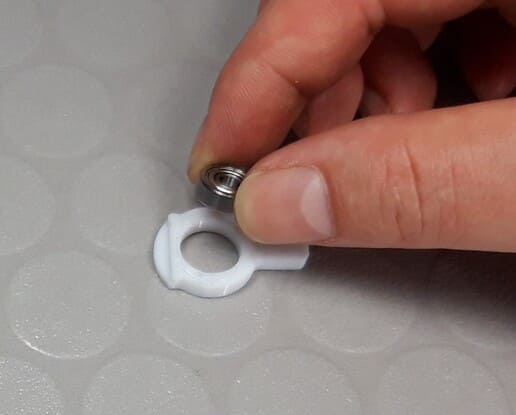
In das Bauteil SO-D (Sensor-Arm) wird ein Kugellager eingesetzt. Das Teil ist so konstruiert, dass das Kugellager in die dafür vorgsehenen Öffnungen eingepresst werden soll. Wenn Ihnen die Kraft in den Fingern nicht ausreicht, können Sie das Kugellager mit einem Schraubstock hineinpressen. Zur Not können Sie auch den Hammer zur Hilfe nehmen. Schlagen Sie aber nicht direkt auf das Kugellager. Legen Sie z.B. ein Stück Holz auf das Kugellager, bevor zu mit dem Hammer darauf schlagen. Je nach Drucktoleranzen kann es vorkommen, dass das Kugellager aber auch sehr leicht hineindrücken geht. Hier besteht die Gefahr, dass das Kugellager mit der Zeit im Betrieb verrutscht. In diesem Fall können Sie einen Tropfen Sekundenkleber auf die Innefläche der Bauteils Bauteil SO-D (Sensor-Arm) geben bevor das Kugellager eingesetzt wird.

Schritt 3/38
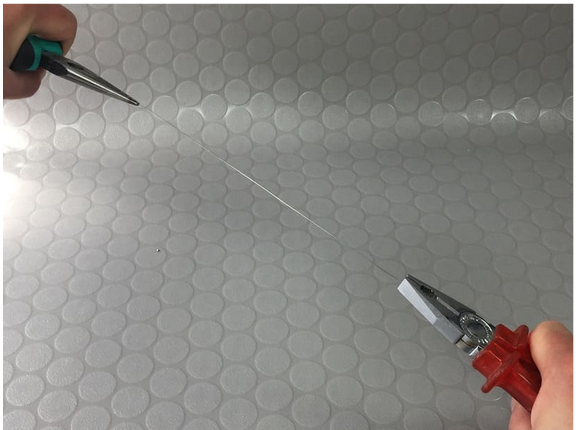
Nötiges Werkzeug: zwei Zangen (Kombizange oder Spitzzange)
Den Draht gerade ziehen. Dazu klemmen Sie die Enden des Drahts zwischen zwei Zangen ein und ziehen fest daran. Dann sollte der Draht gerade sein. Alternativ kann ein Ende des Draht in einen Schraubstock eingespannt werden.
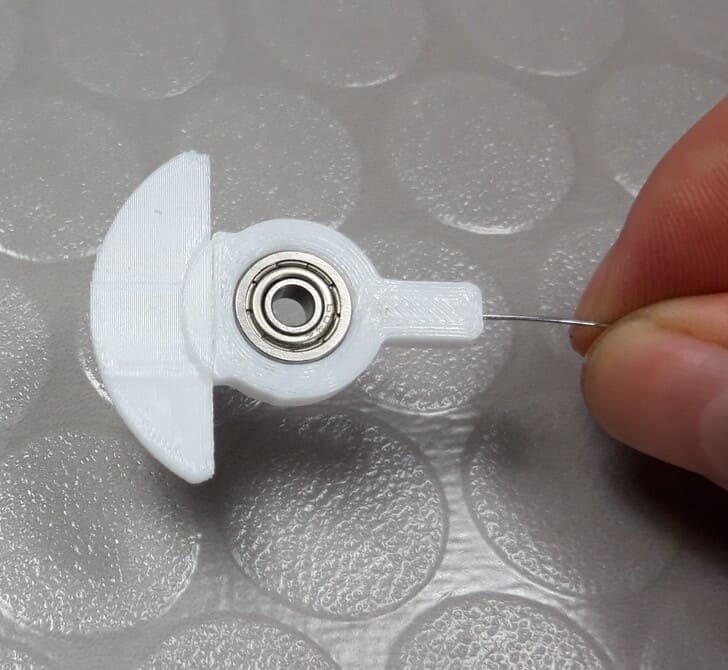
Schritt 4/38
Prüfen Sie, ob sich der Draht in die kleine Bohrung im Bauteil SO-D (Sensor-Arm) stecken lässt. Wenn er sich hineinstecken lässt fahren Sie mit dem nächsten Schritt fort. Je nach Drucktoleranz kann es passieren, dass sich der Draht nicht in die kleine Bohrung stecken lässt. In diesem Fall greifen Sie den Draht mit einer Zange (Spitzzange) und erhitzen das Ende des Drahts mit einem Feuerzeug. Wenn der Draht heiß ist, drücken Sie ihn mit der Zange in die kleine Bohrung am Bauteil SO-D (Sensor-Arm). Nach dem Abkühlen sollte der Draht fest sitzen. Dann fahren Sie mit Schritt 7 fort. Sollte der Draht nicht fest sitzen, fahren Sie mit dem nächsten Schritt fort.

Schritt 5/38
Aus Packstück 6 entnehmen: 2x Gummihandschuhe
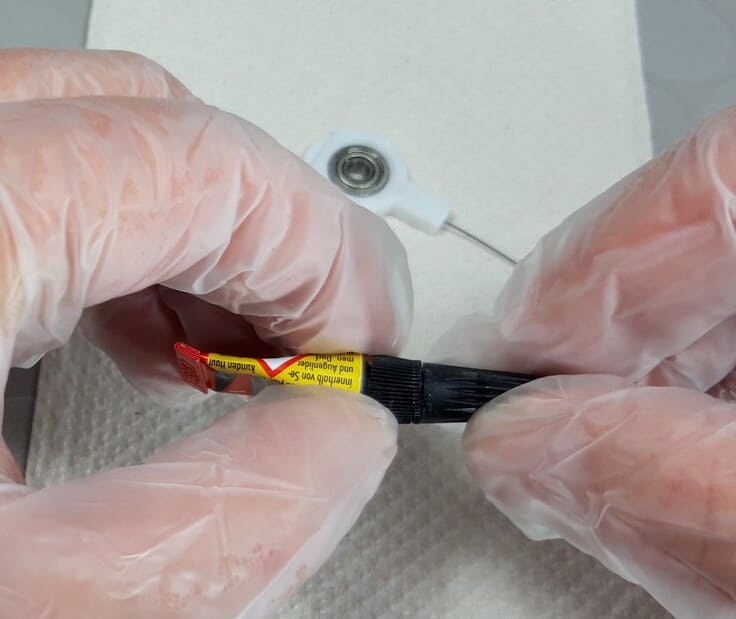
Achtung bei der Verwendung von Sekundenkleber: Klebt innerhalb von Sekunden Haut und Augenlider zusammen. Dämpfe reizen Schleimhäute, Augen und Atmung stark. Vermeiden Sie den Hautkontakt. Tragen Sie Schutzhandschuhe. Arbeiten Sie in einem gut beläufteten Raum.
Machen Sie den Sekundenkleber einssatzbereit. Der Kleber ist versiegelt, wenn er geliefert wird. Die Versiegelung wurde im Kapitel „01-Exruder Getriebe Aufbau“ bereits geöffnet.

Schritt 5/38
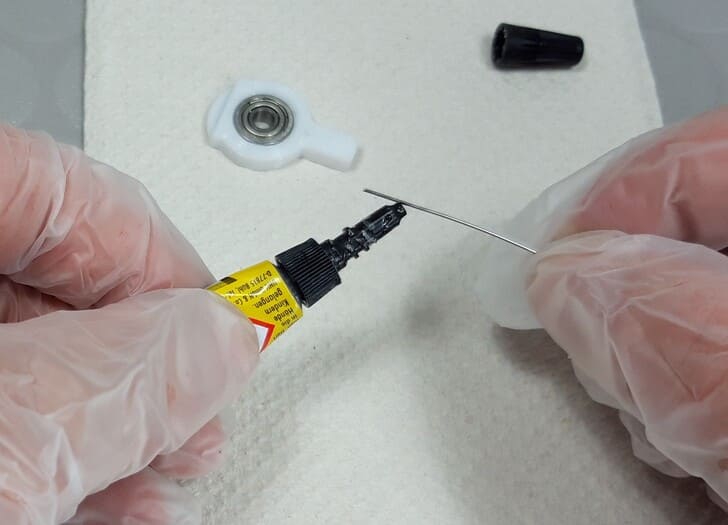
Achtung bei der Verwendung von Sekundenkleber: Klebt innerhalb von Sekunden Haut und Augenlider zusammen. Dämpfe reizen Schleimhäute, Augen und Atmung stark. Vermeiden Sie den Hautkontakt. Tragen Sie Schutzhandschuhe. Arbeiten Sie in einem gut beläufteten Raum.
Benetzen Sie das Ende des Drahtes mit Sekundenkleber. Dann stecken Sie es in die kleine Bohrung im Bauteil SO-D (Sensor-Arm). Legen Sie den Sensorarm ab, bis der kleber getrocknet ist. Das kann je nach größe der Bohrung (durch die Drucktoleranzen) unterschiedlich lange dauern. Wenn der Draht recht locker in der Bohrung sitzt, kann es bis zu 40 Minuten dauern. Wenn der Draht recht eng in der Bohrung seitzt, kann es wenige Sekunden dauern.

Schritt 6/38
Den Sekundenkleber schnell wieder verschließen.
Schritt 7/38
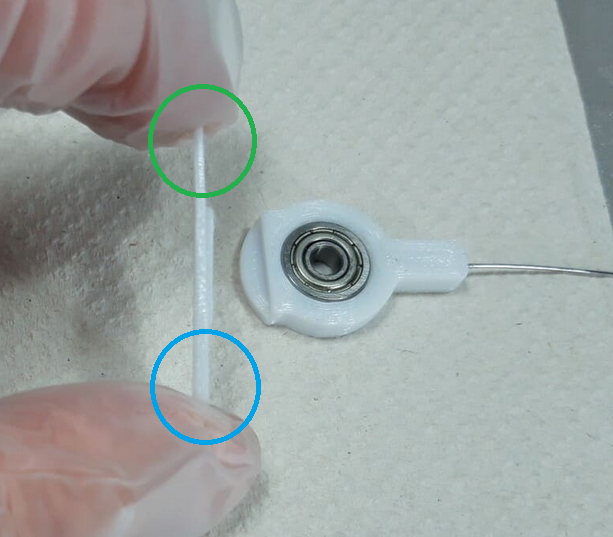
Legen Sie den Sensorarm wie abgebildet ab. Nehmen Sie das Bauteil SO-E (Sensor-Blende, im Lieferumfang des Bausatzes enthalten) zur Hand. Richten Sie das Bauteil so aus, dass das dünnere Ende nach oben gerichtet ist (grüner Kreis in den Bildern) und das dickere Ende nach unten gerichtet ist (blauer Kreis in den Bildern).

Schritt 8/38
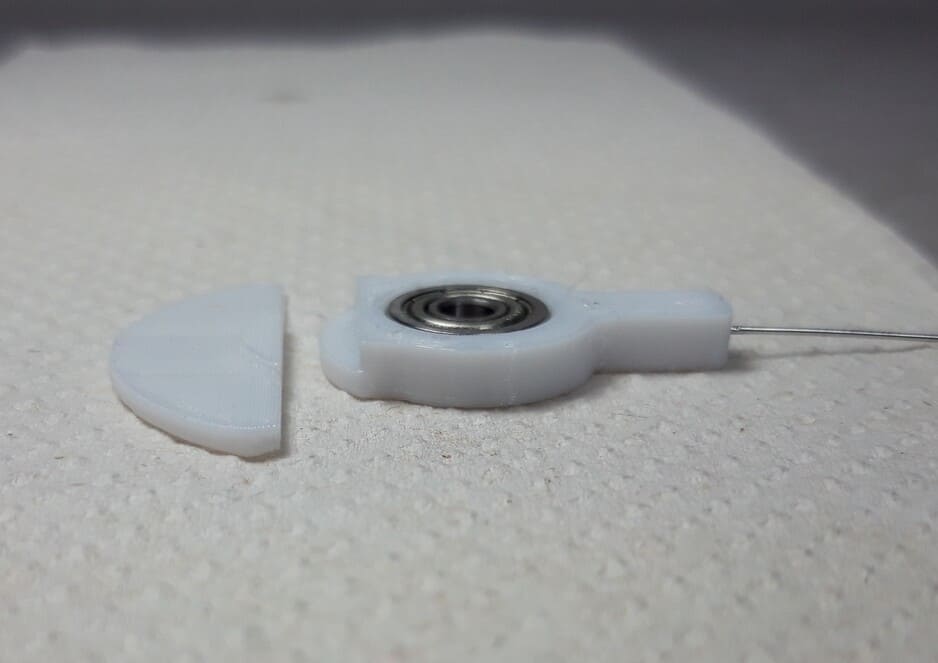
Legen Sie das Bauteil in dieser Position und wie abgebildet neben den Sensorarm.
Schritt 9/38
Achtung bei der Verwendung von Sekundenkleber: Klebt innerhalb von Sekunden Haut und Augenlider zusammen. Dämpfe reizen Schleimhäute, Augen und Atmung stark. Vermeiden Sie den Hautkontakt. Tragen Sie Schutzhandschuhe. Arbeiten Sie in einem gut beläufteten Raum.
Benetzen Sie die Aussparung am Sensorarm mit Sekundenkleber und halten das Bauteil SO-E (Sensor-Blende) in die Aussparung. Achten Sie darauf, dass die Blende passgenau in der Aussparung sitzt.


Schritt 10/38
Pressen Sie die Bauteile ein paar Sekunden mit den Fingern zusammen. Legen Sie dann den Sensor auf die Seite zum aushärten. Achten Sie darauf, dass alles so gestützt ist, dass es sich nicht mehr verschieben kann. Kontrollieren, dass der Draht noch richtig in der Bohrung sitzt.

Schritt 11/38
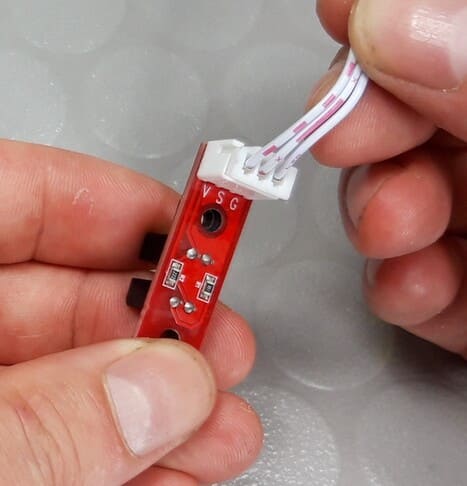
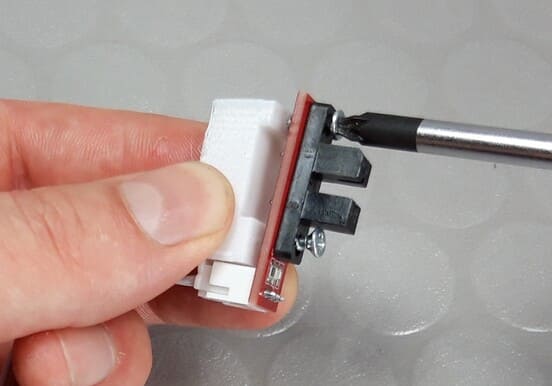
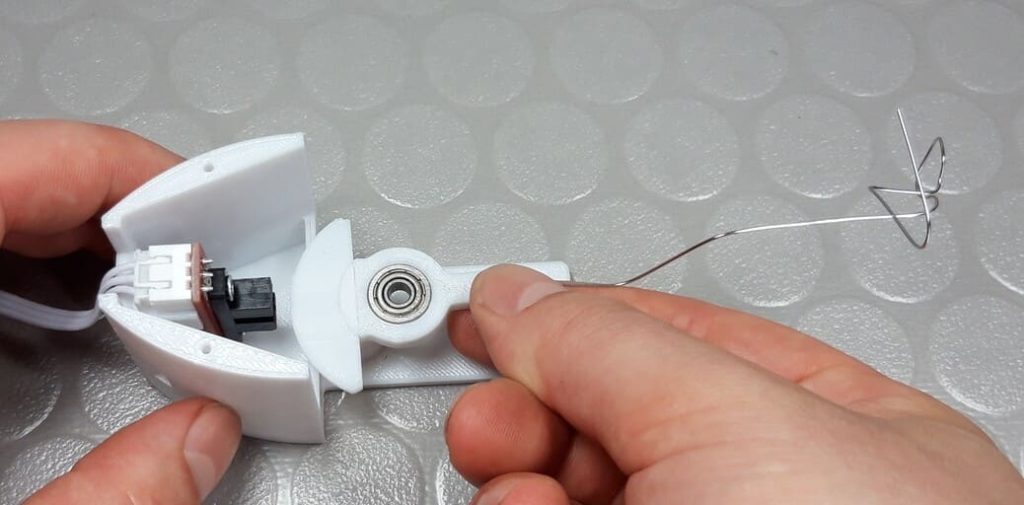
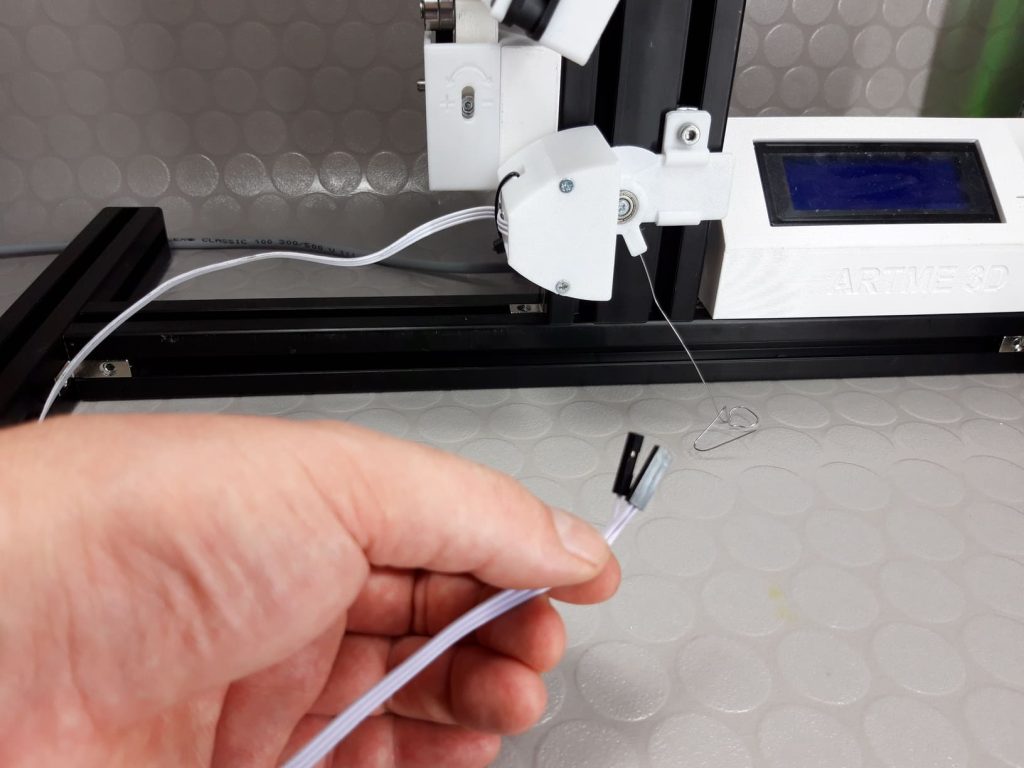
Nehmen Sie das Bauteil Sensor mit Anschlussleitung (EL-11) zur Hand. Auf der Rückseite sind die Buchstaben V, S und G zu finden. Diese bezeichnen die drei Leitungen. Die Leitungen unterscheiden sich durch die Farbkodierung. Notieren Sie sich, welcher Buchstaben zu welcher Leitung führt. In diesem Beispiel von dem Sensor auf dem Foto ist es wie folgt:
Der Anschluss „V“ ist die Leitung mit kurzen Strichen.
Der Anschluss „S“ ist die Leitung mit langen Strichen.
Der Anschluss „G“ ist die Leitung ohne Striche.
Je nach Typ, können diese Markierung auf den Leitungen unterschiedlich sein. Daher müssen Sie die Farbkodierung bei Ihrem Sensor aufschreiben.
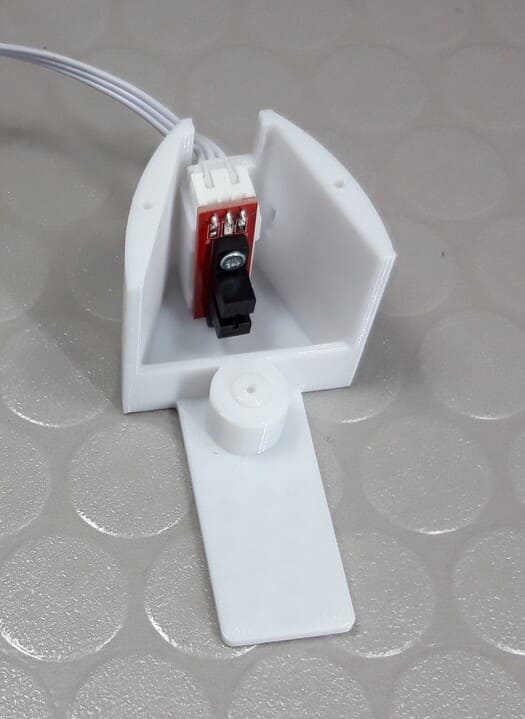
Schritt 12/38
Positionieren Sie den Sensor und das Bauteil SO-C (Sensor-Befestigung) wie dargestellt. Das Bauetil SO-C (Sensor-Befestigung) hat ein dickeres und eine dünneres Ende. Achten Sie auf die korrekte Ausrichtung.

Schritt 13/38
Der Sensor wird mit zwei Holzschrauben 2,5×12 befestigt.
Schritt 14/38
Positionieren Sie den Sensor wie dargestellt in Bauteil SO-A (Gehäuse)

Schritt 15/38
Drehen Sie zwei Holzschrauben in die dargestellten Bohrungen. Drehen Sie die Schrauben noch nicht fest, die positionierung erfolgt gleich.


Schritt 16/38
Nehmen Sie den Sensorarm zur Hand und prüfen Sie, ob der Sekundenkleber ausreichend fest geworden ist. Wenn nicht, warten Sie noch weitere Minuten.
Schritt 17/38
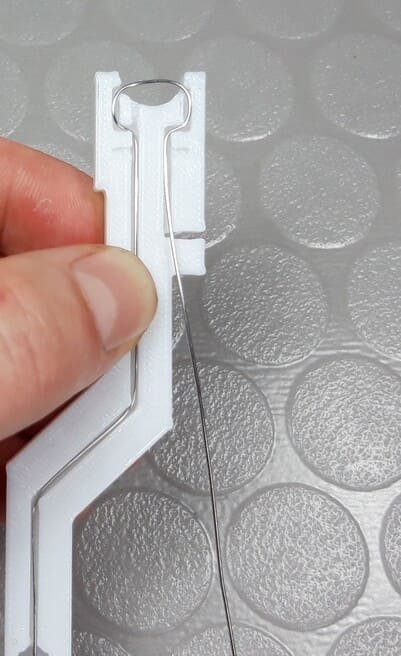
Führen Sie den Sensorarm in das Bauteil SO-G (Biegehilfe) ein, siehe Bild. Achten Sie darauf, dass das dünnere Ende der Blende nach oben gerichtet ist.

Schritt 18/38
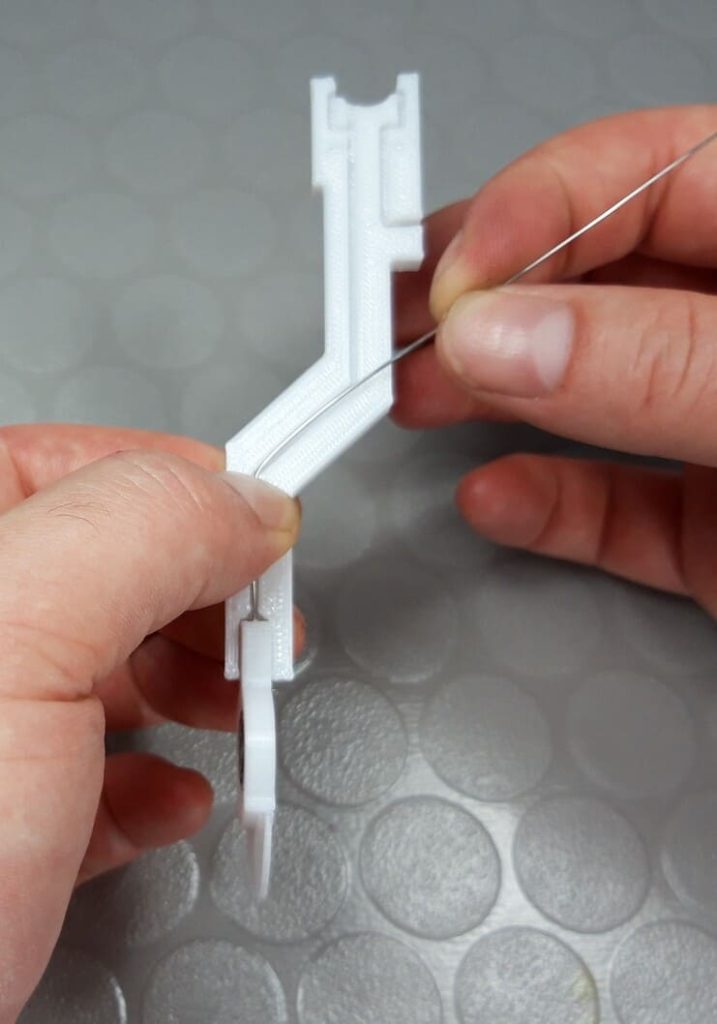
Drücken Sie den Draht in die dafür vorgesehene Nut in der Biegehilfe.

Schritt 19/38
Biegen Sie den Draht entlang der Nut. Siehe Bilder.

Schritt 20/38
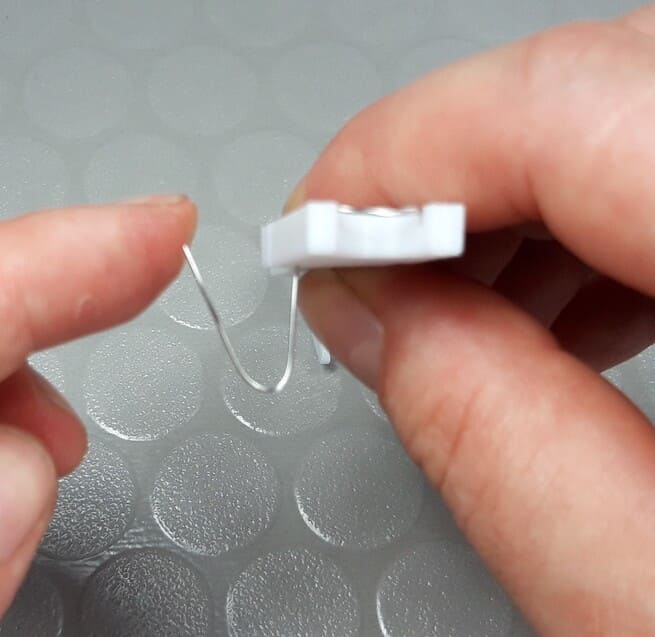
Das Ende des Drahtes wird zur Seite heraus geführt und dann nach unten gebogen. Siehe Bilder.


Schritt 21/38
Das nach unten gebogene Endstück wird in der Hälfte wieder nach oben gebogen, sodass ein V-Förmiges Stück entsteht.
Schritt 22/38
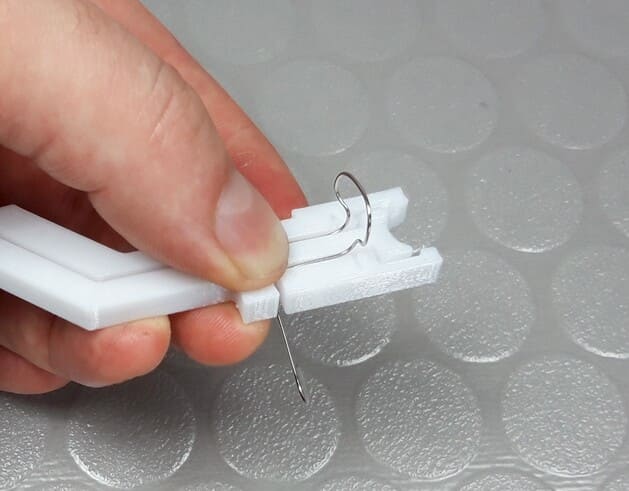
Halten Sie die geförmte Öse mit dem Daumen an der markierung fest. Dann biegen SIe die Öse nach oben.


Schritt 23/38
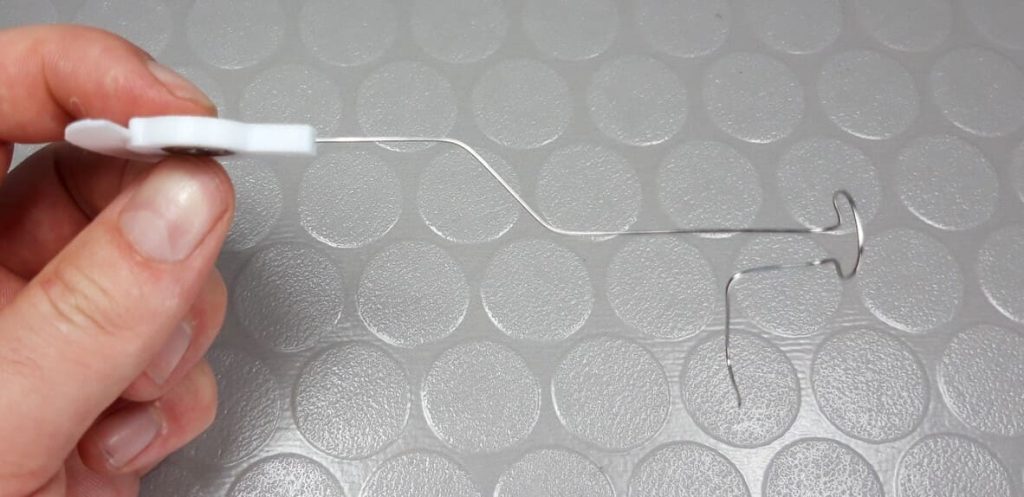
So sollte der Sensorarm nun aussehen. Prüfen Sie nochmals, dass das dünnere Ende der Blende nach oben gerichtet ist.
Schritt 24/38
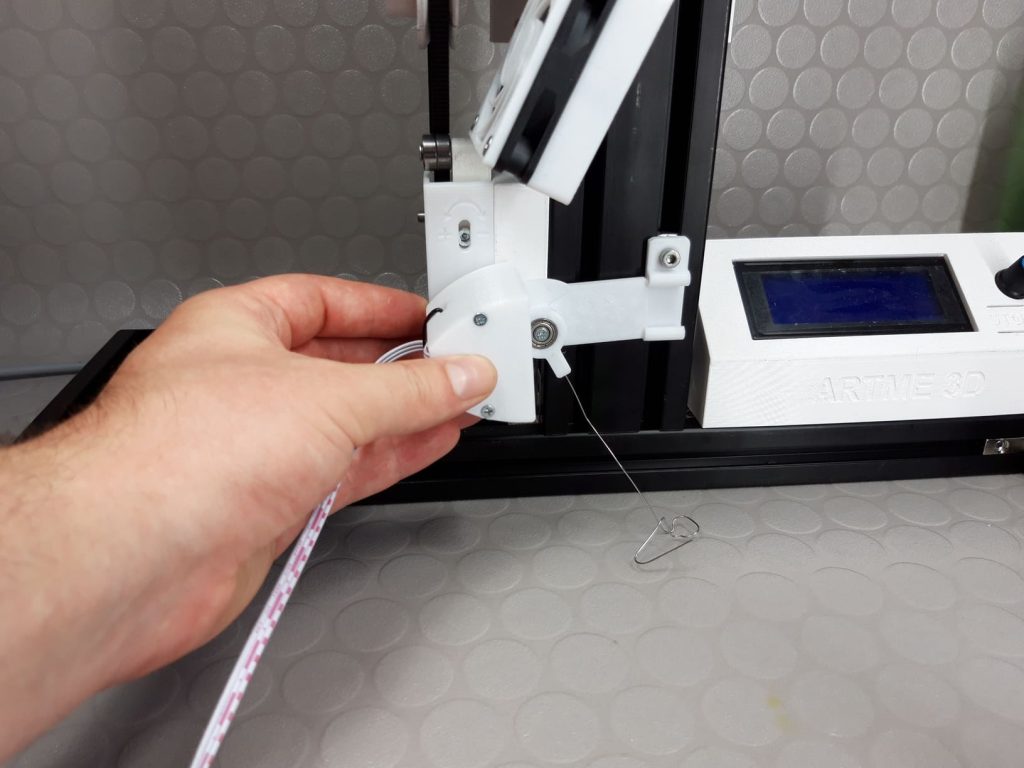
Legen Sie den Sensorarm mit dem Kugellager auf das Bauteil SO-A (Gehäuse), wie dargestellt. Auch hier muss das dünnere Ende der Blende nach oben gerichtet sein. Achten Sie darauf, dass die Blende sich innerhalb des Sensors befindet. (Falls nicht, schieben Sie den Sensor hoch oder runter, um die richtige Psoition zu finden). Dann schrauben Sie das Kugellager mit einer Holzschraube 2,5×12 fest.

Schritt 25/38
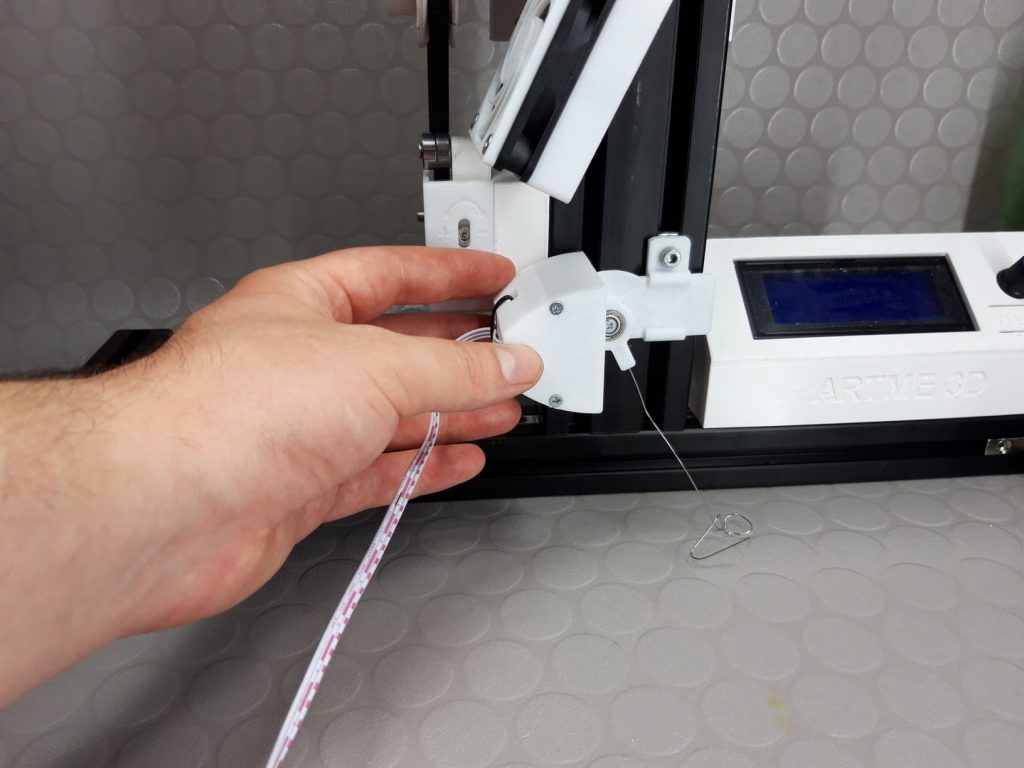
Bewegen Sie den Sensorarm hoch und runter. Er muss vollkommen freigängig sein und vom eigenen Gewicht nach unten fallen, wenn Sie ihn loslassen. Sollte die Blende am Sensor reiben, verschieben Sie den Sensor, bis die Reibung komplett verschwunden ist.

Schritt 26/38
Dann schrauben Sie die Holzschrauben fest. Danach kontrollieren SIe noch einmal, ob sich der Sensorarm vollkommen frei bewegen lässt. Wenn nicht, wiederholen Sie den Vorgang.

Schritt 27/38
Positionieren Sie das Bauteil SO-B (Deckel) wie dargestellt und schrauben es mit zwei Holzschrauben 2,5×12 fest.


Schritt 28/38
Benötigtes Werkzeug: Seitenschneider
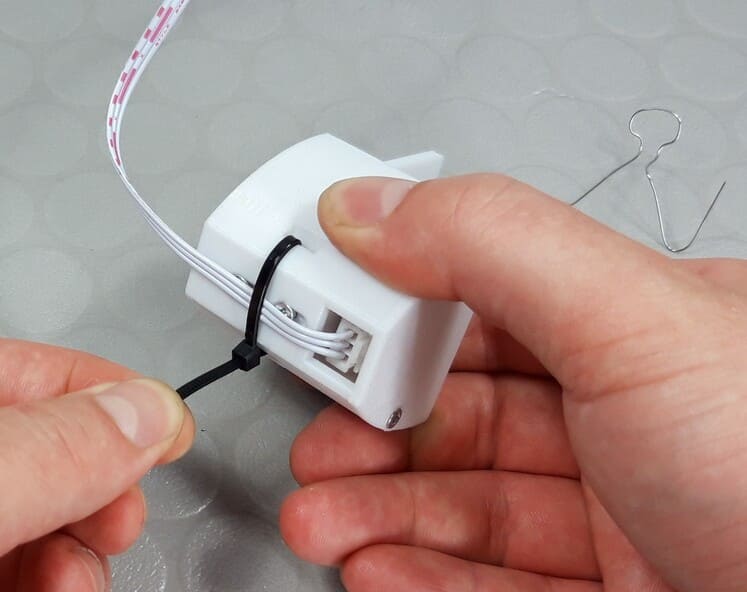
Führen Sie den Kabelbinder (SP-23) durch die dargestellte Öffnung. Ziehen ihn fest und schneiden das überstehende Ende ab.



Schritt 29/38
Benötigtes Werkzeug: Seitenschneider
Stecken Sie eine Zylinderschraube M4x10 durch das dargestellte Loch im Bauteil SO-F (Halterung)

Schritt 30/38
Führen Sie die beiden Bauteile in dieser Position zum Nutenstein auf der Vorderseite des Aluprofils. Schrauben Sie die Zylinderschraube in den Nutenstein. Positionieren Sie das Bauteil SO-F (Halterung) wie dargestellt.


Schritt 31/38
Ziehen Sie die Schraube nur so fest an, dass die Halterung noch mit der Hand verschoben werden kann.

Schritt 32/38
Stecken Sie den Sensor seitlich in die Halterung. Wenn der Sensor nur schwer auf die Halterung stecken geht, bearbeiten Sie diese mit Schleifpapier nach, sodass sich der Sensor einfach auf die Halterung stecken lässt aber auch fest sitzt.
Schritt 33/38
Nehmen Sie die Anschlusseitung des Sensors zur Hand.
Schritt 34/38
Führen Sie die Leitung durch die Bohrung im Spulenantrieb.

Schritt 35/38
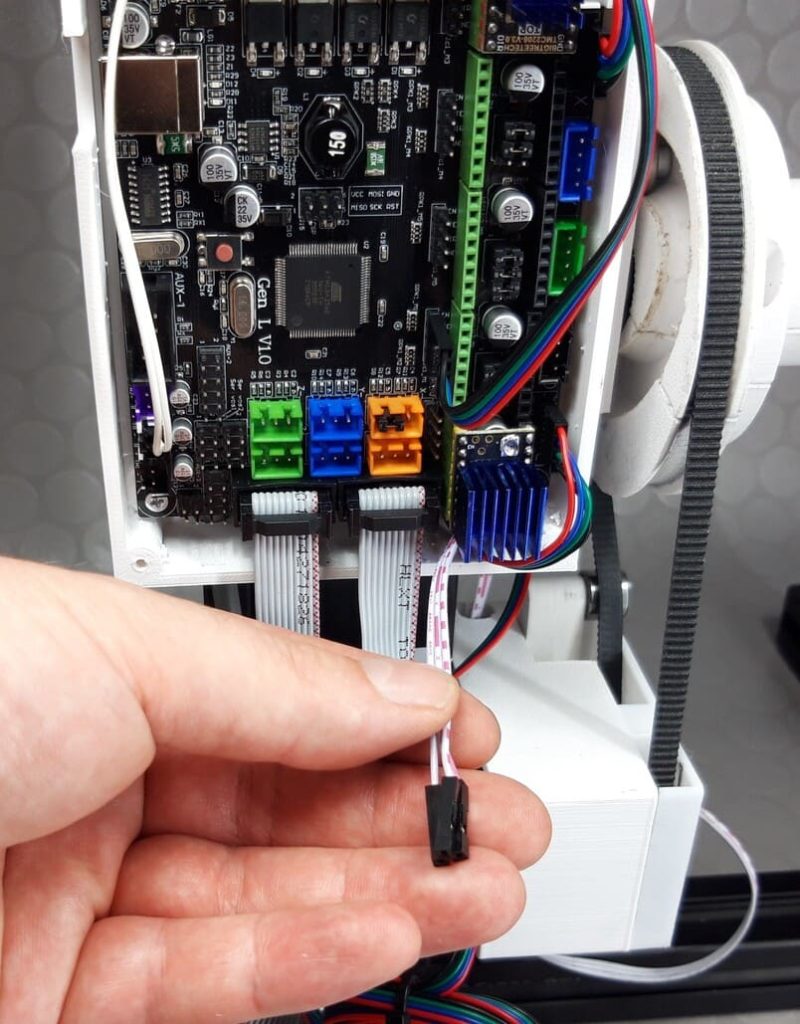
Führen Sie die Leitung durch die Öffnung im unteren Elektronik-Gehäuse. Ziehen Sie die Leitung ein Stück hindurch.

Schritt 36/38
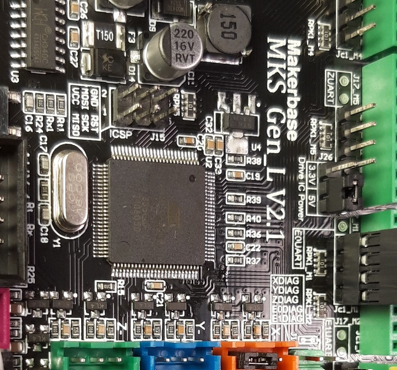
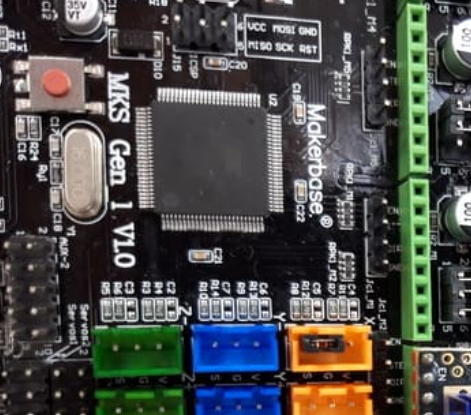
Prüfen sie nun welche Version der Elektronik in Ihrem Bausatz enthalten ist. Es kann das MKS Gen L V1 oder das MKS Gen L V2 sein. Die Beschriftung finden Sie auf dem Board. Siehe Bilder. Wenn Sie die Version V1 haben, fahren Sie mit Schritt 37 fort. Wenn Sie Version V2 haben, fahren Sie mit Schritt 38 fort.
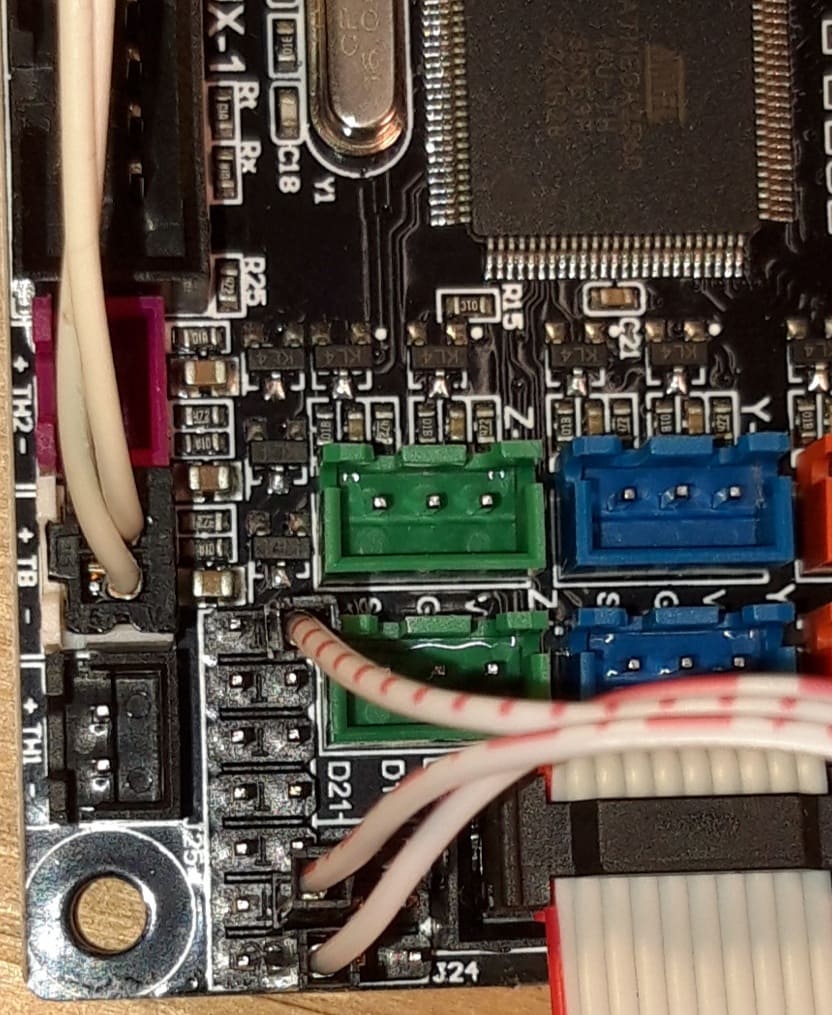
Schritt 37/38
Anleitung für MKS GEN L V1:
Die Leitung wird auf folgende Anschlüsse am MKS-Board gesteckt. Nehmen Sie Ihre Notizen mit der Bezeichnung der einzelnen Leitungen zur Hand. Stecken Sie die entsprechenden Leitungen auf die hier beschriebenen Pins:


Schritt 38/38
Anleitung für MKS GEN L V2:
Die Leitung wird auf folgende Anschlüsse am MKS-Board gesteckt. Nehmen Sie Ihre Notizen mit der Bezeichnung der einzelnen Leitungen zur Hand. Stecken Sie die entsprechenden Leitungen auf die hier beschriebenen Pins:

Geschafft:
Fahren Sie nun mit Aufbauanleitung “12-Restarbeiten MK2.5” fort.